
این ربات که توسط دانشگاه معدن و فناوری چین ساخته شده، قادر به سازگاری با شرایط ریزگرانش در فضا و حرکت در سطوح ناهموار و دهانهدار سیارکها است. نمونه اولیه این ربات ثبت اختراع و موفق به گذراندن بررسیهای اولیه شده است.
با توجه به پیشرفت سریع چین در حوزه فناوریهای معدنکاری فضایی، توسعه این ربات گام مهمی در مسیر استفاده از منابع فرازمینی و تحقق ماموریتهای بلندمدت در فضا بهشمار میرود.
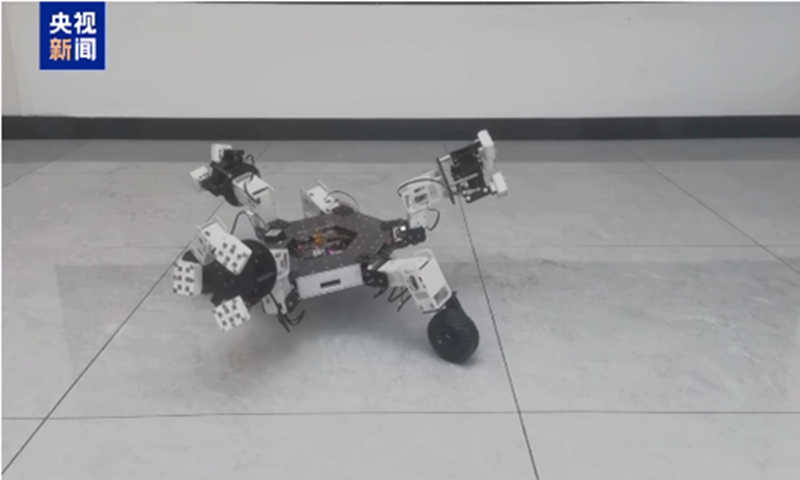
تلفیق چرخ و چنگال برای عبور از سیارکها
ربات چندمنظوره معدنکاری فضایی دانشگاه معدن و فناوری چین (China University of Mining and Technology)، دارای پیکربندی ششپا شامل سه اندام چرخدار و سه اندام چنگالدار است.
این طراحی نوآورانه، بهمنظور سازگاری با محیطهای دارای گرانش بسیار کم مانند سطح ماه و سیارکها ارائه شده است. ساختار الهامگرفته از پنجه و ستون فقرات حشرات به این ربات امکان چسبندگی و تثبیت بهتر را در شرایط ریزگرانش میدهد و به آن اجازه میدهد در هنگام نمونهبرداری، موقعیت خود را تثبیت کند.
منبع: globaltimes

